Robot MEISTeR úspěšně složil mistrovské zkoušky
 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků. 28.2.2014 O záchranném robotu MEISTeR (Maintenance Equipment
Integrated System of Telecontrol Robot) od Mitsubishi Heavy Industries
jsme již před více než rokem psali v článku Malí roboti do nebezpečných
podmínek. Tento robot byl vyvinut pro náročné odklízecí práce v
havarované jaderné elektrárně Fukushima Daiichi. V druhé polovině února
2014 úspěšně skončily jeho demonstrační testy a nyní již čeká na
nasazení v “ostrém provozu“ při dekontaminaci a odběru vzorků.
Zatímco většina dosavadních robotů pro záchranné práce
je primárně určena k provádění inspekcí, údržby a podobných operací
spoléhajících se hlavně na kamery, MEISTeR může provádět širokou škálu
úkonů prostřednictvím výměny nástrojů připevněných k jeho pažím. Kromě
inspekce a údržby tak provede dekontaminační práce, odebere vzorky
betonu, odřízne překážky bránících v průchodu aj.
Robot MEISTeR je 440 kg těžký a má rozměry 1250×700×1300
mm. Ke svému pohonu používá čtyři kolové pásy, s nimiž se může
pohybovat rychlostí 2 km/h, zdolat až 40°sklon (viz foto nahoře) a přejet až
220mm mezeru. Elektrickou energii ke svému pohonu může přivádět kabelem
nebo využívat baterie, jejichž kapacita vystačí na dvě hodiny provozu.
Jeho dvě ramena lze vybavit různými nástroji, podobně
jako lidské ruce. Každé z ramen se může volně pohybovat díky 7-osovému
řídicímu systému. Přitom unese předmět těžký až 15 kg a může provádět
činnost nezávisle na druhém rameni. MEISTeR tak například jedním
ramenem uchopí předmět a druhým jej přeřízne.
 Práci robota lze sledovat a ovládat z bezpečného
stanoviště pomocí kamer, které má na sobě umístěné, s kabelovým nebo
bezdrátovým přenosem signálu. Práci robota lze sledovat a ovládat z bezpečného
stanoviště pomocí kamer, které má na sobě umístěné, s kabelovým nebo
bezdrátovým přenosem signálu.
Demonstrační testy proběhly v prvním bloku elektrárny
Fukushima Daiichi a zahrnovaly mj. dva druhy dekontaminačních prací.
Při prvním byl kontaminovaný materiál vysát speciální hubicí (viz foto
vpravo). Při druhém byla tryskajícím proudem abrazivní hmoty oddělena
tenká
vrstva kontaminovaného povrchu. Testy zahrnovaly také schopnost pohybu
v úzkých průchodech a dále práci při odběru vzorků betonu pro sledování
úrovně kontaminace v reaktorové budově (viz foto dole). Při něm byly
odebírány vzorky betonu z podlahy a stěn do hloubky cca 70 mm. Odběr
prováděla dálkově ovládaná ramena robota, na jejichž koncích byl
upevněn vrták a ruka. 
Podobný úkol nyní čeká MEISTeRa ve druhém bloku
elektrárny. redakce Proelektrotechniky.cz
Foto ©
mitsubishi.com
 Přečtěte
si také další související články z rubriky Průmyslová automatizace: Přečtěte
si také další související články z rubriky Průmyslová automatizace:
 30.4.2014 Společnost Siemens představila české odborné veřejnosti
koncem dubna 2014 plně automatizovaný sklad pro výrobní závod
automobilky Audi AG v Győru v Maďarsku, využívající pohonů s vysokou
účinností a výkonného automatizačního systému. 30.4.2014 Společnost Siemens představila české odborné veřejnosti
koncem dubna 2014 plně automatizovaný sklad pro výrobní závod
automobilky Audi AG v Győru v Maďarsku, využívající pohonů s vysokou
účinností a výkonného automatizačního systému. 
 25.4.2014
Světovou novinku v oblasti řešení datové
infrastruktury RiMatrix S představila společnost Rittal poprvé na
veletrhu CeBIT 2013. Dne 23. – 25. dubna 2014 měli možnost RiMatrix S
shlédnout také odborníci v České republice, a to v rámci celoevropské
roadshow, kterou společnost Rittal odstartovala začátkem dubna 2014.
RiMatrix S je kompletní datové centrum, které se skládá z definovaného
počtu serverových a datových racků řady TS IT, klimatizačních jednotek,
napájecích zdrojů, záložních zdrojů a monitorovacích prvků. 25.4.2014
Světovou novinku v oblasti řešení datové
infrastruktury RiMatrix S představila společnost Rittal poprvé na
veletrhu CeBIT 2013. Dne 23. – 25. dubna 2014 měli možnost RiMatrix S
shlédnout také odborníci v České republice, a to v rámci celoevropské
roadshow, kterou společnost Rittal odstartovala začátkem dubna 2014.
RiMatrix S je kompletní datové centrum, které se skládá z definovaného
počtu serverových a datových racků řady TS IT, klimatizačních jednotek,
napájecích zdrojů, záložních zdrojů a monitorovacích prvků.
 13.2.2014 V lednu 2014 představila společnost ABB české odborné
veřejnosti novou řadu svých průmyslových robotů pod označením IRB 6700,
která je již sedmou generací robotů tohoto výrobce. Zároveň jde o
nejvýkonnější roboty při nejnižších celoživotních nákladech v třídě
150–300 kg. 13.2.2014 V lednu 2014 představila společnost ABB české odborné
veřejnosti novou řadu svých průmyslových robotů pod označením IRB 6700,
která je již sedmou generací robotů tohoto výrobce. Zároveň jde o
nejvýkonnější roboty při nejnižších celoživotních nákladech v třídě
150–300 kg.
 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci. 3.12.2013 Od konce listopadu 2013 odstraňuje kontaminaci v jaderné
elektrárně Fukushima Daiichi 2 robotický vysavač a mycí stroj
přezdívaný „Raccoon“ (mýval), patřící provozovateli elektrárny,
společnosti Tokyo Electric Power Company (Tepco). V rámci zkušebního
provozu se tento robot pohybuje po podlaze prvního podlaží reaktorové
budovy, drhne a umývá tlakovou vodou její povrch, a snižuje tak
radiaci.
 30.9.2013 Systémy nosných ramen umožňují snadné a přesné otáčení, jakož i zvedání
a vychýlení ovládacího panelu. Tím je obsluha stroje kdykoliv „v
naprostém obraze“ a má kontrolu nad strojem nebo zařízením. To, že i v
systémech nosných ramen je ještě hodně inovačního potenciálu, ukazuje
společnost Rittal dalším zdokonalením svých řešení v podobě nové
systémové stavebnice. 30.9.2013 Systémy nosných ramen umožňují snadné a přesné otáčení, jakož i zvedání
a vychýlení ovládacího panelu. Tím je obsluha stroje kdykoliv „v
naprostém obraze“ a má kontrolu nad strojem nebo zařízením. To, že i v
systémech nosných ramen je ještě hodně inovačního potenciálu, ukazuje
společnost Rittal dalším zdokonalením svých řešení v podobě nové
systémové stavebnice.
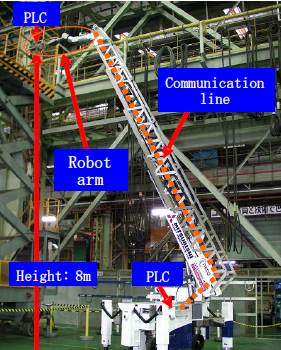 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení 1.7.2013 Jedním z problémů současných průmyslových robotů jsou
silné kabely pro přenos energie a informací mezi tělem robota a
pracovními prvky na konci robotických paží – nástroji, kamerami, čidly
apod. Tyto silné kabely značně omezují manévrovací schopnost robota a
mohou být i jeho zranitelnou součástí. Japonští výrobci Mitsubishi
Heavy Industries, Ltd. (MHI) a NCXX Inc. proto nyní přicházejí s
technickým řešením, které poprvé v průmyslové praxi umožní značně
zredukovat kabeláž robota pomocí technologie komunikace po silovém
vedení
 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou. 16.4.2013
Projektový tým vedený britskou společností OC
Robotics zahájil na konci března 2013 výzkumný a vývojový projekt
LaserSnake2. Jeho cílem je vyvinout robot s dlouhými hadovitými
končetinami pro práci ve stísněných prostorách, ve vzduchu a pod vodou.
 25.2.2013 Diodové vysoce výkonné laserové systémy pro opracovávání
materiálů, jako řezání nebo sváření, hrají v průmyslu stále důležitější
roli. Jejich výhodou oproti jiným typům průmyslových laserů jsou nižší
provozní náklady, vyšší výkonnost a menší velikost. Tento typ laserů je
také stále důležitější při opracovávání optických materiálů. S
rozšiřováním jejich použití roste celkový důraz na jejich nákladovou
efektivnost. Vývoj v této oblasti se zaměřuje na zvyšování výkonů a
zároveň snižování nákladů laserových systémů. 25.2.2013 Diodové vysoce výkonné laserové systémy pro opracovávání
materiálů, jako řezání nebo sváření, hrají v průmyslu stále důležitější
roli. Jejich výhodou oproti jiným typům průmyslových laserů jsou nižší
provozní náklady, vyšší výkonnost a menší velikost. Tento typ laserů je
také stále důležitější při opracovávání optických materiálů. S
rozšiřováním jejich použití roste celkový důraz na jejich nákladovou
efektivnost. Vývoj v této oblasti se zaměřuje na zvyšování výkonů a
zároveň snižování nákladů laserových systémů.
 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů. 23.2.2013 Odstraňování následků nehody v jaderné elektrárně
Fukushima je neustálou výzvou pro technologie průmyslových robotů,
které umí samostatně vykonávat manuální práce v nepřístupných místech
nebo v kontaminovaném prostředí. Po úspěšném robotu MEISTeR přichází Mitsubishi Heavy Industries (MHI) s dalším unikátním robotem
označeným jako MHI-Super Giraffe (MARS-C), tedy „superžirafa“. Název
tohoto robota je jednak akronym, a jednak výstižné pojmenování jeho schopnosti dosáhnout až do výšky 8 metrů.
 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti. 24.12.2012
V posledních týdnech roku 2012 se světu představili malí roboti pro
záchranné práce v nepřístupném prostředí – robot MEISTeR od firmy
Mitsubishi Heavy Industries a robot Tetrapod od firmy Toshiba. Ačkoliv
jejich celková koncepce je na první pohled odlišná, oba sloučí
podobnému účelu a mají podobnou pohonnou jednotku i některé další
vlastnosti.

|